
Pengukuran merupakan hal yang penting dalam dunia ilmu pengetahuan. Pengukuran-pengukuran tersebut antara lain: pengukuran waktu dari satu kejadian ke kejadian yang lainnya, pengukuran temperatur/suhu suatu daerah, pengukuran kecepatan dari suatu benda, pengukuran tinggi dari satu titik ke titik lain.
Panjang dan tinggi merupakan salah satu
besaran fisis yang sering diukur dalam berbagai keperluan yang
membutuhkan data tinggi seseorang. Alat ukur tinggi badan yang beredar
dipasaran, kurang memungkinkan untuk mendapatkan data yang akurat,
karena kebanyakan alat ukur tinggi badan yang beredar dipasaran masih
bersifat manual. Artinya untuk mendapatkan data tinggi badan seseorang
masih menggunakan cara pengukuran dengan tenaga manusia.
Selaras dengan perkembangan jaman, dibutuhkan alat pengukur tinggi badan yang dapat bekerja secara otomatis, melakukan proses pengukuran, membaca hasil pengukuran, sekaligus memberitahukan hasil pengukuran tersebut secara dual mode dimana output yang dihasilkan yaitu berupa suara dan alat pengukuran ini dirancang menggunakan android sebagai interface dengan berbasis mikrokontroler ATmega328 yang telah dikonfigurasi untuk mempengaruhi kinerja sistem sensor ultrasonik agar dapat mendeteksi tinggi badan seseorang. Seseorang yang sedang diukur tinggi badannya dapat mengetahui secara langsung hasil pengukurannya. Pembacaan hasil yang didapat lebih akurat dan presisi jika dibanding dengan hasil pembacaan manusia.

 Perancangan Prototipe
Perancangan Prototipe









Selaras dengan perkembangan jaman, dibutuhkan alat pengukur tinggi badan yang dapat bekerja secara otomatis, melakukan proses pengukuran, membaca hasil pengukuran, sekaligus memberitahukan hasil pengukuran tersebut secara dual mode dimana output yang dihasilkan yaitu berupa suara dan alat pengukuran ini dirancang menggunakan android sebagai interface dengan berbasis mikrokontroler ATmega328 yang telah dikonfigurasi untuk mempengaruhi kinerja sistem sensor ultrasonik agar dapat mendeteksi tinggi badan seseorang. Seseorang yang sedang diukur tinggi badannya dapat mengetahui secara langsung hasil pengukurannya. Pembacaan hasil yang didapat lebih akurat dan presisi jika dibanding dengan hasil pembacaan manusia.
Ultrasonik Sebagai Pengukur Jarak
Menurut Subandi (2009:29-39) [27],
Gelombang ultrasonik adalah gelombang mekanis yang mempunyai daerah
frekuensi diatas kemampuan manusia atau diatas 20 Khz. Karena
frekuensinya yang tinggi, gelombang ini lebih mudah diarahkan dari pada
gelombang yang berada dibawah daerah frekuensinya. Gelombang ini biasa
digunakan dalam aplikasi pengukuran jarak.
Prinsip kerja dari sensor ultrasonik adalah sebagai berikut:
- Sinyal dipancarkan oleh pemancar ultrasonik. Sinyal tersebut berfrekuensi diatas 20kHz, biasanya yang digunakan untuk mengukur jarak benda adalah 40kHz. Sinyal tersebut di bangkitkan oleh rangkaian pemancar ultrasonik.
- Sinyal yang dipancarkan tersebut kemudian akan merambat sebagai sinyal / gelombang bunyi dengan kecepatan bunyi yang berkisar 344 m/s. Sinyal tersebut kemudian akan dipantulkan dan akan diterima kembali oleh bagian penerima Ultrasonik.
- Setelah sinyal tersebut sampai di penerima ultrasonik, kemudian sinyal tersebut akan diproses untuk menghitung jaraknya.
Gambar 2.21 Ilustrasi Cara Kerja Ultrasonik
Sensor
Ultrasonik mendeteksi jarak obyek dengan cara memancarkan gelombang
ultrasonik (40 kHz) kemudian mendeteksi pantulannya. Gelombang
ultrasonik ini melalui udara dengan kecepatan 344 meter per detik,
mengenai obyek dan memantul kembali ke sensor.
Pada
bagian ini, proses pengukuran jarak dapat dilakukan hanya dengan
memberikan trigger dan mendeteksi lebar pulsa Echo saja seperti pada
modul ultrasonik pada umumnya. Hasil pengukuran dalam bentuk pulsa dapat
ditentukan dengan menghitung lebar pulsa yang keluar pada bagian Echo.
Lebar pulsa tersebut mewakili waktu merambatnya sinyal ultrasonik dari
sensor ke obyek dan kembali lagi, oleh karena itu jarak dapat diperoleh
dengan persamaan.
Sesuai rumus fisika:
s = v.t
Namun
waktu yang dihitung adalah waktu pergi dan waktu datang sehingga jarak
yang ditempuh adalah dua kali. Jadi untuk menghitung jarak
Keterangan :
s = Jarak hasil pengukuran (meter )
v = Kecepatan gelombang suara di udara (meter / sekon)
t = Waktu antara gelombang dikirim dan diterima (sekon)
Flowchart Sistem Yang Berjalan
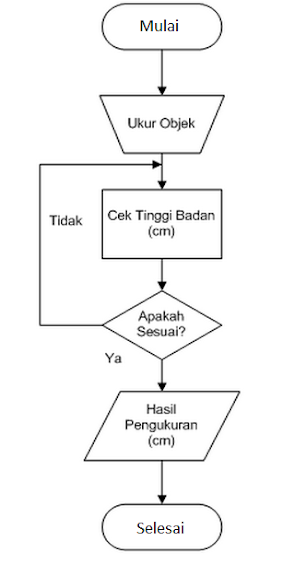
Berikut adalah flowchart sistem pengukur tinggi badan yang berjalan pada gambar 3.3.
Gambar 3.3 Flowchart Sistem Pengukur Tinggi Badan Yang Berjalan
Dapat dijelaskan gambar 3.3 Flowchart Sistem
pengukur tinggi badan yang berjalan pada SDIT Al-Istiqomah diatas yaitu
terdiri dari:
- 2 (dua) simbol terminal, yang berperan sebagai “Mulai” dan “Selesai” pada aliran proses flowchart sistem pengukur tinggi badan yang berjalan.
- 1 (satu) simbol manual operation yang menyatakan proses pengolahan yang tidak dilakukan oleh komputer.
- 1 (satu) simbol proses yang menyatakan sebuah proses pengukuran tinggi badan.
- 1 (satu) simbol data, yang menyatakan proses input atau output tanpa tergantung jenis peralatannya, yaitu: Hasil pengukuran tinggi badan dalam satuan cm.
- 1 (satu) simbol decision, yang berperan untuk menunjukan sebuah langkah pengambilan keputusan jika “ya” dan “tidak”, yaitu: Apakah tinggi badan yang diukur sesuai atau tidak. Jika "Tidak" maka pengukuran akan dicek kembali, jika "Ya" maka hasil pengukuran dapat dihasilkan dalam satuan cm.
Flowchart Sistem Yang Diusulkan
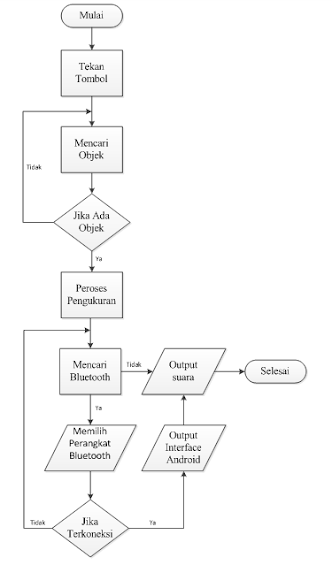
Berikut adalah flowchart sistem pengukur tinggi badan yang berjalan pada gambar 3.4.
Gambar 3.4 Flowchart Sistem Pengukur Tinggi Badan Yang Diusulkan
Dapat dijelaskan gambar 3.4 Flowchart Siatem
pengukur tinggi badan yang diusulkan pada SDIT Al-Istiqomah diatas yaitu
terdiri dari:
- 2 (dua) simbol terminal, yang berperan sebagai “Mulai” dan “Selesai” pada aliran proses flowchart sistem pengukur tinggi badan yang berjalan.
- 4 (empat) simbol proses yang menyatakan sebuah proses yang dimulai dari menekan tombol, mencari objek kemudian melakukan proses untuk pengukuran tinggi badan untuk dapat ditampilkan di interface andorid harus mencari perangkat bluetooth lalu kemudian output didapatkan.
- 2 (dua) simbol decision, yang berperan untuk menunjukan sebuah langkah pengambilan keputusan jika “ya” dan “tidak”, yaitu: Mencari objek, jika ada abjek maka siste akan memproses pengukuran dan jika tidak ada abjek maka sistem akan kembali mencari objek. Setelah itu untuk melakukan proses pengukuran sistem akan mencari perangkat bluetooth, jika ya maka sistem akan memilih perangkat dan menghasilkan output ke interface android dan suara.
- 3 (tiga) simbol data yang menyatakan proses input atau output tanpa tergantung jenis peralatannya, yaitu: dengan memilih perangkat bluetooth dengan hasil output pengukuran tinggi badan yaitu output di interface android dan suara.
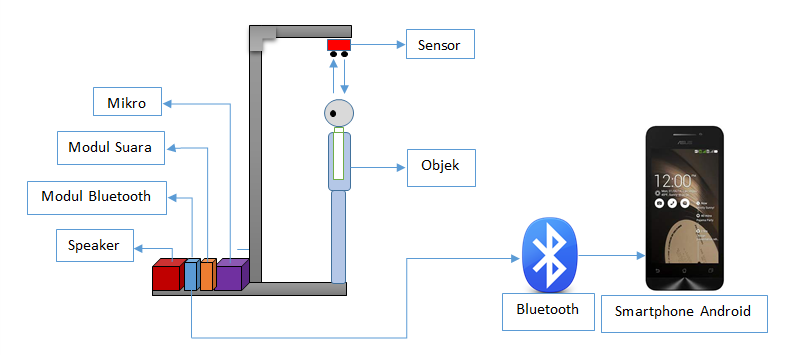
Prototipe
pengukur tinggi badan menggunakan sensor ultrasonik berbasis
mikrokontroler ATmega328 dual mode, dalam perancangan disusun menyerupai
alat ukur tinggi badan pada umumnya. Alat ini dilengkapi dengan
komponen seperti: Sensor ultrasonik, mikrokontroler, modul suara,
bluetooth, modul bluetooth dan smartphone android serta speaker yang
dijadikan sebagai output suara untuk mendukung kinerja alat tersebut.
Bahan dalam perancangan prototipe terbuat dari besi ringan yang
digunakan sebagai tiang.
Gambar 3.5 Perancangan Prototipe
Metode Prototipe
Metode
yang dipakai adalah metode prototyping evolutionary, karena dengan
evolutionary ini sistem atau produk yang sebenarnya dipandang sebagai
evolusi dari versi awal yang sangat terbatas menuju produk final atau
produk akhir.
Tabel 3.1 Perbandingan Metode Perancangan
Gambar 3.6 Perbandingan Pengukuran
Cara Kerja Alat
Gambar 3.7 Cara Kerja Alat
Perhatikan
pada gambar diatas. TMax adalah tinggi sensor dengan tanah. Pada code
nanti, TMax akan tertulis 200. Untuk JS adalah jarak antara sensor
dengan kepala atau obyek. Sedangkan TB adalah hasil dari TMax - JS untuk
mengetahui tinggi badan seseorang.
Saat objek berdiri di bawah sensor ultrasonik tersebut, maka sensor akan
mendeteksi apabila ada objek atau media lain dibawah sensor tersebut.
Ketika sinyal mengenai benda penghalang, maka sinyal akan dipantulkan
pemancar (transmitter) dan diterima oleh penerima (receiver) ultrasonik.
Sinyal yang diterima oleh receiver di kirimkan ke rangkaian
mikrokontroler untuk selanjutnya mengolah dan mengontrol hasil pembacaan
yang diterima dari sensor ultrasonik, sehingga dapat dihasilkan suatu
informasi tentang keberadaan objek sekaligus mengukur tinggi antara
objek dengan alat sesuai dengan algoritma program yang dibuat. Serta
output yang dihasilkan berupa suara dan interface di smartphone android.
Perangkat Keras (Hardware)
1.
Rangkaian minimum sistem mikrokontroler ATmega328
Gambar 3.9 Rangkaian minimum sistem mikrokontroler ATmega328
Keterangan:
- Pin 2 (RXD), merupakan jalur untuk melakukan proses penerimaan data pada komunikasi serial.
- Pin 3 (TXD), merupakan jalur untuk melakukan proses pengiriman data pada komunikasi serial. Pada sistem ini menggunakan relay untuk mengirimkan perintah berupa string ke rangkaian modul bluetooth dan voice module untuk menghasilkan informasi yang sesuai.
- Pin 1 (RESET), digunakan untuk proses reset program, yaitu mengembalikan program pada kondisi awal atau baris perintah program seperti pertama kali sistem berjalan.
- Pin 9 (XTAL1), merupakan pin masukan untuk sumber clock eksternal pada rangkaian mikrokontroler sehingga mikrokontroler akan bekerja dengan kecepatan sesuai dengan nilai dari crystal dan konfigurasi nilai clock pada program.
- Pin 10 (XTAL2), merupakan keluaran clock yang dapat digunakan untuk sumber clock rangkaian lain yang di rangkai secara serial.
- Pin 8 dan 22, merupakan ground pada rangkaian mikrokontroler yang terhubung langsung dengan rangkaian ground catu daya.
- Pin 7 (VCC), 20 (AVCC), 21 (AREF), merupakan pin yang masing-masing pin dihubungkan secara bersamaan pada tegangan +5V pada rangkaian catu daya. Ini dilakukan jika pin input analog pada mikrokontroler ATmega328 tidak di fungsikan sebagai Analog to Digital Converter, sedangkan jika pin analog akan digunakan sebagai ADC maka pin 20 dihubungkan pada tegangan +5V melalui lilitan dengan nilai 100uH agar tegangan yang digunakan tidak terpengaruh oleh fluktuatif tegangan kerja pada mikrokontroler. Sedangkan pada pin 21 dihubungkan dengan komponen variabel resistor atau trimpot untuk melakukan pengaturan tegangan referensi yang sesuai dengan kebutuhan dalam aplikasinya.
- Pin 11 (T1), merupakan pin yang dihubungkan dengan rangkaian sensor ultrasonik, yang difungsikan sebagai sensor pendeteksi jarak objek yang berada tepat didepan sensor tersebut. pada pin ini merupakan pin yang digunakan sebagai sumber interupsi eksternal pertama pada mikrokontroler ATmega328.
2.
Rangkaian Modul Bluetooth HC-05
Dalam
rangkaian ini tidak banyak pin yang digunakan, yang dibutuh kan hanya,
Pin TX dan Pin RX untuk komunikasi data dengan mikrokontroler, pin
PIO11 yang dihubungkan ke VCC pada saat kita akan melakukan konfigurasi,
pin PIO9 dan pin PIO8 dihubungkan ke LED untuk indikasi bahwa Modul
Bluetooth HC-05 dalam keadaan menyala, dan terakhir pin 3,3V ke sumber
tenaga dan pin GND yang dihubungkan ke ground.
Gambar 3.10 Skema pin modul Bluetooth HC-05
3.
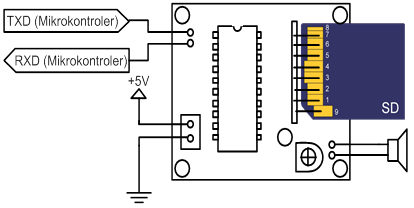
Rangkaian Voice Module
Secara
keseluruhan pada voice module ini hanya terdapat dua buah komunikasi
data secara serial dengan perangkat mikrokontroler. Module ini akan
mengeluarkan suara sesuai dengan string yang diterima dari rangkaian
mikrokontroler yang terhubung secara serial serta file suara yang
tersimpan dalam memori SD card disesuaikan dengan kebutuhan pada
aplikasi yang dibuat. Adapun format untuk perangkat SD card yang
digunakan adalah menggunakan FAT16 serta format suara yang tersimpan
pada memori SD card tersebut dalam bentuk file WAV dan dengan
masing-masing pada nama file diinisialisasikan dengan urutan sesuai
abjad.
Gambar 3.11 Rangkaian Voice Module
Keterangan:
- Pin (RXD), merupakan jalur untuk melakukan proses penerimaan data pada komunikasi serial.
- Pin (TXD), merupakan jalur untuk melakukan proses pengiriman data pada komunikasi serial. Pada sistem ini digunakan untuk mengirimkan perintah berupa string ke rangkaian voice module untuk menjalankan voice yang sesuai.
4.
Rangkaian Sensor Ultrasonik
Sensor
ultrasonik adalah sebuah piranti yang didesain untuk dapat
mentransmisikan gelombang ultrasonik dan menghasilkan pulsa keluaran
yang sesuai dengan waktu tempuh untuk pemancaran dan pemantulan
gelombang. Dengan menghitung waktu tempuh dari pulsa maka jarak sensor
dengan target dapat dengan mudah dihitung, proses pengukuran jarak
dilakukan hanya dengan memberikan Trigger dan mendeteksi lebar pulsa
Echo seperti pada modul sensor ultrasonik pada umumnya, hasil pengukuran
dalam bentuk pulsa dapat ditentukan dengan menghitung lebar pulsa yang
keluar pada bagian Echo. Lebar pulsa tersebut mewakili waktu merambatnya
sinyal ultrasonik dari sensor ultrasonik ke obyek dan kembali lagi.
Sensor ultrasonik bekerja dengan menggunakan tegangan sumber sebesar 5
volt dc, sensor objek ditunjukan pada gambar 3.11
Gambar 3.12 Rangkaian Sensor Ultrasonik
Keterangan:
- VCC, merupakan masukan untuk tegangan kerja sensor tersebut sebesar +5V.
- GND, dihubungkan dengan kutub negatif atau ground pada rangkaian.
- OUT, sebagai keluaran yang dihubungkan pada pin PD.2 mikrokontroler ATmega328 yang akan memberikan logika high (1) dan Low (0) pada mikrokontroler untuk mendeteksi adanya objek, sensor ultrasonik bekerja dengan mentransmisikan gelombang ultrasonik dan menghasilkan pulsa keluaran yang sesuai dengan waktu tempuh untuk pemancaran dan pemantulan gelombang. Dengan menghitung waktu tempuh dari pulsa maka jarak dengan objek dapat dihitung.
5.
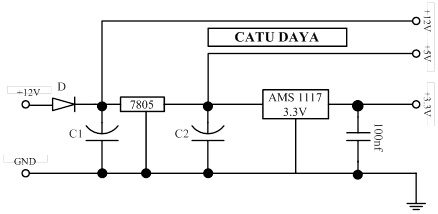
Rangkaian Catu Daya
Catu
daya merupakan bagian yang sangat penting. Karena tanpa adanya catu
daya, maka semua rangkaian tidak akan bekerja. Rangkaian ini berfungsi
untuk mensuplay tegangan keseluruh rangkaian yang ada. rangkaian catu
daya yang dibuat mempunyai keluaran 3,3 volt digunakan untuk mensuplay
tegangan ke komponen modul buetooth, 5 volt digunakan untuk mensuplay
tegangan ke komponen mikrokontroler dan modul suara, 12 volt digunakan
untuk mensuplay tegangan ke komponen relay. rangkaian catu daya
ditunjukan pada gambar 3.12
Gambar 3.13 Rangkaian catu daya
Keterangan:
- Tegangan masuk sebesar 12V didapat dari sumber tegangan.
- D, digunakan untuk memastikan pemasangan baterai tidak terbalik dan tidak membuat short rangkaian. Jika menggunakan arus AC komponen ini dapat digunakan sebagai penyearah setengah gelombang (Half wave), tipe dioda yang digunakan adalah 1N4002.
- C1, merupakan komponen elektrolit capasitor (Elco) yang berfungsi sebagai perata ripple tegangan awal sebelum masuk pada komponen penurun tegangan atau lebih dikenal dengan IC regulator adapun nilai yang digunakan adalah sebesar 100uF/16V.
- Adaptor 12 volt digunakan sebagai tegangan kerja komponen relay.
- IC 7805, digunakan menurunkan tegangan menjadi +5V yang digunakan sebagai tegangan kerja komponen mikrokontroler dan modul suara.
- IC 1117, digunakan menurunkan tegangan menjadi +3,3V yang digunakan sebagai tegangan kerja komponen modul buetooth.
- C2, digunakan sama seperti pada komponen C1 akan tetapi bentuk kapasitor yang digunakan berbeda yaitu menggunakan nilai 100nF.
Perangkat Lunak (Software)
Setelah
proses rangkaian perangkat keras selesai dibuat langkah selanjutnya
adalah membuat perancangan perangkat lunak, meliputi penulisan listing
program yang akan disimpan atau ditanam di dalam mikrokontroler dengan
menggunakan suatu software BASCOM-AVR dan bahasa pemogramannya adalah
bahasa BASIC, dimana perintah-perintah program tersebut akan di eksekusi
oleh hardware atau sistem yang di buat.
1. Perancangan Program Mikrokontroler ATmega328
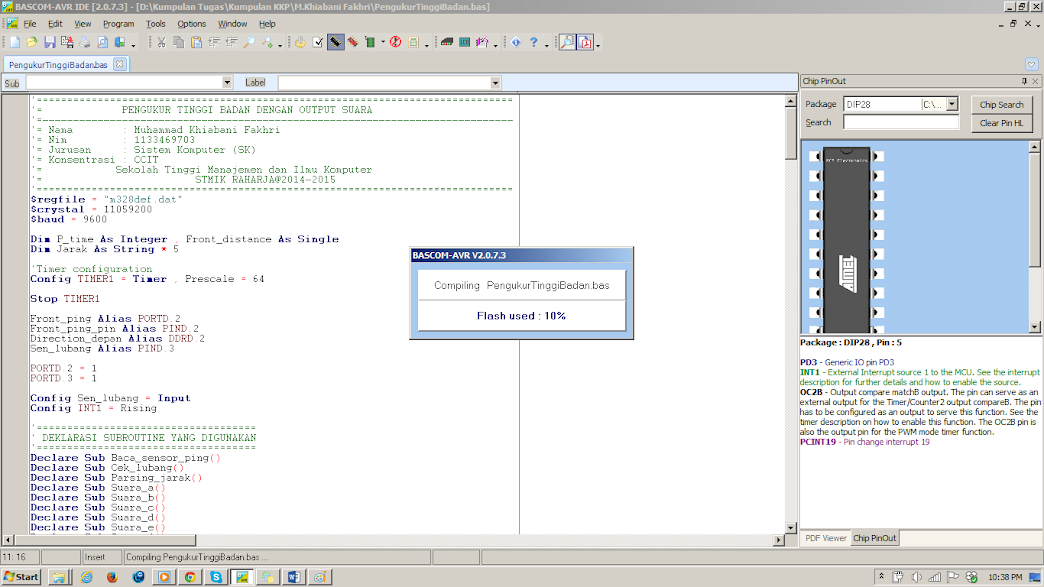
Pada perancangan perangkat lunak yaitu menggunakan program BASCOM-AVR yang digunakan untuk menuliskan listing program
Setelah itu program disimpan dan dibuat dengan nama file.bas dalam
penelitian ini akan diberikan nama PengukurTinggiBadan untuk disimpan
pada folder yang sudah ditentukan. dan kemudian akan dikompilasi menjadi
file heksa yaitu dengan nama PengukurTinggiBadan.hex. File heksa
yang dihasilkan setelah proses kompilasi tersebut akan dimasukkan
kedalam mikrokontroler ATmega328 menggunakan isp flash programmer,
sehingga mikrokontroler akan bekerja sesuai dengan perintah yang ada
pada memori flash, yang digunakan untuk mengendalikan input dan output dari mikrokontroler ATmega328 untuk mengukur tinggi badan dengan output suara dan ditampilkan dalam interface android.
Gambar 3.14 Kompilasi File BAS
Untuk memasukkan program kedalam mikrokontroler menggunakan aplikasi ProgIsp. Langkah – langkah nya adalah sebagai berikut:
Mikrokontroler
bisa bekerja jika didalamnya sudah dimasukkan listing program yang
sudah dibuat dengan menggunakan program aplikasi BASCOM AVR. Untuk
melakukan proses pengisian menggunakan perangkat keras dan perangkat
lunak, untuk rangkaian perangkat keras yang digunakan untuk memasukkan
program heksa kedalam mikrokontroler.Dengan menggunakan kabel isp flash
programmer, maka file heksa yang sudah dibuat dapat langsung dimasukkan
kedalam mikrokontroler ATmega328.
Siapkan
downloader mikrokontroler kemudian instal. Jalankan program aplikasi
progisp versi 1.72, tentukan jenis mikrokontroler dan kemudian isi
memori dari mikrokontroler ATmega328 akan ditampilkan dengan melalui
proses pembacaan dari isi mikrokontroler tersebut. Pengisian memori
buffer ini untuk dimasukkan kedalam mikrokontroler ATmega328, pilih file
PengukurTinggiBadan.Hex, lalu lakukan mode auto dan proses verifying
setelah itu pengisian file heksa kedalam mikrokontroler ATmega328 siap
untuk digunakan.
Gambar 3.15 Jendela Untuk Memilih File
2. Konfigurasi Modul Bluetooth HC 05
Sebelum
menggunakan modul Bluetooth sebagai media komunikasi, maka yang perlu
dilakukan adalah mengkonfigurasinya agar dapat bekerja dengan baik dan
sesuai dengan apa yang dibutuhkan sistem. Langkah pengaturan tersebut
adalah sebagai berikut:
- Beri tegangan sebesar 3,3 volt pada pin 3,3.
- Hubungkan pin GND dengan kutub negatif baterai.
- Hubungkan pin PI011 dengan tegangan 3,3 volt.
- Hubungkan pin PI09 ke LED1 untuk indikasi bahwa modul Bluetooth dalam keadaan aktif.
- Hubungkan pin PI08 ke LED2 untuk indikasi bahwa terjadi komunikasi/pengiriman data.
- Hubungkan pin TX dan RX ke kabel USB to Serial, Kemudian koneksikan ke komputer.
- Jalankan aplikasi Hyperterminal untuk mengkonfigurasi modul Bluetooth HC-05.
- Untuk mencoba apakah modul Bluetooth dan komputer sudah terhubung dengan baik ketikkan perintah “AT” kemudian tekan enter, jika muncul “OK” pada Hyperterminal, maka koneksi telah terbentuk dengan baik.
- Untuk mengganti nama Modul Bluetooth, masukkan perintah AT+NAME=”nama” kemudian tekan enter.
- Untuk merubah password masukkan perintah AT+PSWD=”password yang diinginkan” kemudian tekan enter.
- Untuk mengetahui fungsi dari modul Bluetooth masukkan perintah AT+ROLE?, jika AT+ROLE=0 maka modul Bluetooth berperan sebagai Slave. Jika AT+ROLE=1 maka modul Bluetooth berperan sebagai Master. Yang diperlukan dalam penelitian ini adalah slave.
- Proses pengaturan telah selesai.
3. Perancangan Software Basic4android
Untuk
membuat sebuah aplikasi android diperlukan sebuah development tools
berbasis Java tetapi untuk penelitian ini penulis menggunakan
Basic4Android karena development tools ini berbasis Object Oriented Programming Language
yang memiliki sintaks sama persis seperti Visual Basic. Basic4Android
didesain sedemikian rupa sehingga memudahkan developer untuk
mengembangkan aplikasi android menggunakan bahasa Visual Basic dan IDE
yang mudah untuk digunakan.
Eksekusi
aplikasi Basic4Android pilih menu File → New Tuliskan kode program pada
IDE Basic4Android. Save kode programnya pada Local Disk (C:).
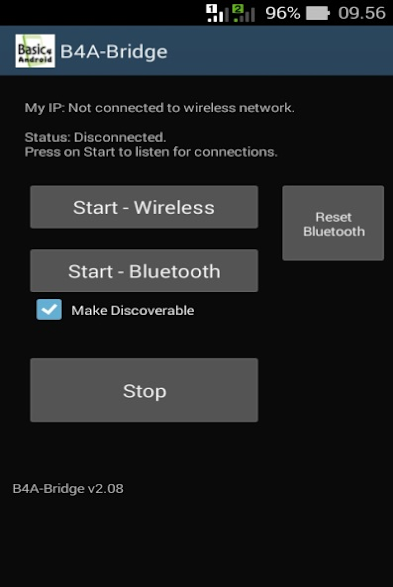
Selanjutnya hidupkan jaringan bluetooth Smartphone Android dan
koneksikan pada laptop. Kemudian jalankan B4A-Bridge pada smartphone
Android. Ada 2 pilihan pada aplikasi ini yaitu Tombol Start – Wireless
dan Tombol Start – Bluetooth. Dalam hal ini Penulis menekan tombol Start
– Bluetooth karena konfigurasi nya yang lebih mudah dan efektif. Lalu
koneksikan IDE Basic 4 Android.
Gambar 3.16 Tampilan Basic 4 Android
Gambar 3.17 Tampilan B4A-Bridge pada Smartphone Android
Setelah
device terhubung, maka otomatis B4A-Bridge pada IDE Basic 4 Android dan
Smartphone Android berstatus “Connected”Klik menu Designer pada
Basic4Android Pada kotak dialog Designer, klik menu File > Save dan
ketikkan Layout Name “Menu1” kemudian klik tombol Ok. Klik menu Add View
> pilih salah satu atau lebih komponen, misalnya Label dan EditText.
Edit Label dan EditText tersebut sesuai keinginan lalu Save. Kemudian
kembali ke program utama, jalankan kode program yang sudah dibuat pada
Basic4Android. Pilih Release dan Klik tombol Run, seperti gambar berikut
ini. Tunggu hingga proses Compile & Release Selesai.
Gambar 3.18 Menu Run
Analisa Program Pada Mikrokontroler
Pada program yang dimasukkan kedalam mikrokontroler terdapat beberapa fungsi. Berikut adalah listing program mikrokontrolernya:
Adapun fungsi pada setiap penulisan listing program adalah sebagai berikut:

Koding ini berfungsi untuk mendeklarasikan
seri mikrokontroler yang akan digunakan. Pada coding di atlas tertulis
“m328def.dat” yang dimaksudkan untuk mikrokontroler tipe ATmega328.

Koding ini berisi nilai yang sesuai dengan crystal yang dipakai. Dalam hal ini menggunakan crystal 11,0592 MHz.

Koding ini menyatakan konfigurasi serial yang berfungsi untuk sistem transfer data menggunakan baudrate 9600 bps.

Koding di atas berfungsi untuk konfigurasi, dimana PORTC dijadikan
sebagai output.


Koding di atas ini berfungsi untuk inisialisasi sub rutin yang dipakai.

Koding di atas berfungsi sebagai program utama yang dijalankan.

Koding diatas adalah subrutin baca dan hitung tinggi badan.

Koding di atas adalah subrutin kontrol relay.

Koding diatas berfungsi untuk mengirimkan data
hasil penghitungan melalui komunikasi Bluetooth agar dapat di tampilkan
pada smartphone android.
Analisa Program Aplikasi Android
Pada aplikasi android terdapat beberapa fungsi
antara lain fungsi komunikasi Bluetooth dan login password. Berikut
adalah listing program aplikasi android:

Koding di atas berfungsi untuk menampilkan hasil peritungan sensor pada label yang tedapat pada applikasi android.

Koding diatas berisi perintah untuk menerima
masukan input sensor jika Cmd_Read ditekan. Setelah inputan masuk maka
akan disimpan dalam bentuk angka dan dapat di panggil oleh button read.

Koding ini berisi variable untuk memilih
device yang ingin dikoneksikan. Sebelum nya device yang ingin
dikoneksikan harus sudah dalam pairing atau dikenali oleh smartphone
Android.

Koding ini berisi notifikasi apabila sukses melakukan pairing pada device yang diinginkan maka akan mengubah status Disconected menjadi Connected.
| Estimasi Biaya | |||||||||||
| Hardware | |||||||||||
| Minimum Sistem Mikrokontroler | 100.000 | ||||||||||
| Sensor Ultrasonik | 250.000 | ||||||||||
| Modul Suara | 100.000 | ||||||||||
| Modul Bluetooth | 150.000 | ||||||||||
| Catu Daya | 40.000 | ||||||||||
| Relay | 10.000 | ||||||||||
| Software | |||||||||||
| Software BASCOM-AVR | 200.000 | ||||||||||
| Software Basic4android | 200.000 | ||||||||||
| Software Microsoft Visio 2010 | 200.000 |
Total 1.150.000
Sumber
http://widuri.raharja.info/index.php?title=Backup_Fakhri#Estimasi_Biaya
Sumber
http://widuri.raharja.info/index.php?title=Backup_Fakhri#Estimasi_Biaya
boleh minta codingan jelasnya gak?
ReplyDeletekalau boleh kirim dong ke email
daniyunita.dy@gmail.com
artikel nya sangat membantu, apa boleh minta kirim file koding nya ke email irfansp@gmail.com
ReplyDeletethanks.
artikel sangat bagus,, boleh minta sourcecode nya aryku07@gmail.com
ReplyDeleteminta codingannya dong ke taufikkamil170696@gmail.com
ReplyDeletegan saya pakai sensor tipe HC-SR04 kenapa gak bisa mengukur sampai 200cm ? ada solusi ?
ReplyDeleteeweh idingan
ReplyDeleteGan boleh minta codinganya biar lebih jelas, kirim ke okkyoctana@gmail.com
ReplyDeleteBoleh minta codingnya kirim ke tara.niscita@gmail.com
ReplyDeleteBoleh minta codingnya kirim ke tara.niscita@gmail.com
ReplyDeleteBoleh minta codingannya? Kirim ke aqilwinantiasta@gmail.com terimakasih
ReplyDeleteKalau agan tidak keberatan, kirim script nya di dwitoro13@gmail.com , kalau bisa secepat nya. terimakasih
ReplyDeleteMas boleh kirim coding nya ke email saya alwikill@gmail.com
ReplyDeleteMas boleh kirim coding nya ke email saya alwikill@gmail.com
ReplyDeleteMaaf, boleh minta kodingannya ga kak? maharani.glee@gmail.com
ReplyDeleteMakasihhh
mas boleh minta codingannya? kirim alifiasarinu@gmail.com
ReplyDeletemakasiih
mas, minta tolong kirim codingannya dong alifiasarinu@gmail.com
ReplyDeletemakasih
mas boleh minta kirimin codingnya dong Wahyudin.wahyudin9@yahoo.co.id
ReplyDeletemas boleh minta kirim codingnya?
ReplyDeletepoppyfgpurba@gmail.com